4 Hauptunterschiede zwischen Vektorregelung und Drehmomentregelung
Hallo zusammen, heute werden wir zwei wichtige Regelungsstrategien für frequenzvariable Antriebe (VFDs) besprechen: Vektorregelung und Drehmomentregelung. Dies sind die grundlegendsten Steuerungsmethoden in VFD-Antriebe und werden oft als Hochleistungs-VFD-Steuerungsmethoden bezeichnet.
Viele Menschen verwechseln die beiden Begriffe: der eine ist eine Steuerungstechnik, der andere eine Steuerungsart. Einfach ausgedrückt, ist die Vektorsteuerung eine Steuerungsmethode, während die Drehmomentsteuerung ein Steuerungsziel oder eine Betriebsart ist. Im Folgenden werden wir uns mit den Unterschieden und Zusammenhängen zwischen beiden befassen.
Konzeptionelle Unterschiede
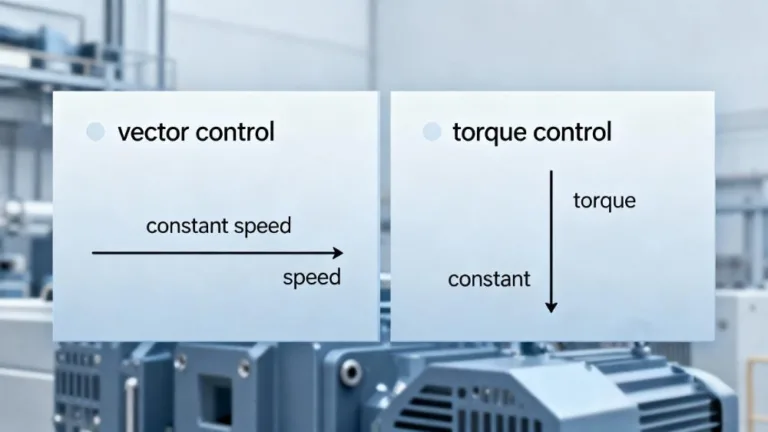
Innerhalb der VFD-Regelungsmethoden wird die Vektorregelung hauptsächlich für die Drehzahlregelung verwendet, während die Drehmomentregelung für die Regelung des konstanten Drehmoments eingesetzt wird.
Unter der Annahme, dass der VFD derzeit im Vektorregelungsmodus arbeitet, ist sein Eingang ein Drehzahlsollwert. Das Ziel des Systems ist es, eine hochpräzise Übereinstimmung zwischen der Ausgangsdrehzahl und der eingestellten Frequenz aufrechtzuerhalten, d.h. eine konstante Drehzahlregelung.
Wenn der VFD im Drehmomentregelungsmodus arbeitet, ist sein Eingangssignal der Drehmomentsollwert.
Zum Beispiel: 0V entspricht 0N-m, 10V entspricht 200N-m, und wenn der Sollwert 5V ist, beträgt der Ausgang 100N-m. Hier ist das Ziel des Systems, ein stabiles Drehmoment zu liefern.
Zusammengefasst:
- Das Regelungsziel der Vektorregelung ist die Drehzahlstabilität
- Das Regelungsziel der Drehmomentregelung ist ein konstantes Drehmoment
Ihre Steuerungslogik ist zwar unterschiedlich, aber die zugrunde liegenden Algorithmen sind eng miteinander verwandt.
Arbeitsprinzip der Vektorkontrolle
Das Kernkonzept der Vektorregelung (auch bekannt als Flussvektorregelung oder Feldorientierungsregelung, FOC) besteht darin, das Regelungsprinzip eines Gleichstrommotors nachzuahmen (Gleichstrommotor-Analogie).
In Gleichstrommotoren gibt es zwei wichtige Magnetfelder:
- Der Magnetisierungsfluss des Feldes (liefert den magnetischen Fluss)
- Das Ankerfeld (erzeugt das Drehmoment)
Bei der Vektorregelung für VFD-Antriebe zerlegt das Regelsystem den Strom des Asynchronmotors in zwei Komponenten:
- Komponente Magnetisierungsstrom: Verantwortlich für den Aufbau des magnetischen Flusses
- Drehmoment erzeugende Stromkomponente: verantwortlich für die Erzeugung des Drehmoments
Durch diese feldorientierte Regelung verhält sich der Asynchronmotor wie ein Gleichstrommotor und erreicht eine hochpräzise Drehzahlregelung und ein dynamisches Verhalten.
Gemeinsame Anwendungen Dazu gehören: Kräne, Aufzüge, CNC-Maschinen und Szenarien, die eine extrem hohe Geschwindigkeitsregelung erfordern.
Bei diesen Anwendungen erreicht die Vektorregelung eine schnelle und stabile Drehzahlregelung durch PID-Regler und minimiert gleichzeitig effektiv die durch die Schlupfregelung verursachten Fehler.
Steuerlogik der Drehmomentregelung
Die Drehmomentregelung basiert auf der Drehmomentabgabe und wird häufig in Szenarien mit konstanter Spannung verwendet, z. B. bei der Auf-/Abwickelsteuerung, der Steuerung der Spannung von Metallbändern, Textilmaschinen und Papiermaschinen.
Sein Hauptziel ist die Aufrechterhaltung eines stabilen Ausgangsdrehmoments unabhängig von Drehzahlschwankungen.
In der Vektorsteuerung ist die Drehmomentsteuerung von Natur aus eingebettet.
Ein Beispiel: Wenn ein Frequenzumrichter auf 25 Hz eingestellt ist, die Rückführgeschwindigkeit aber nur 24,9 Hz beträgt, erkennt das System den Drehzahlfehler und passt die Drehmomentkomponente automatisch an. Durch Aktivierung des Drehmomentmodus des Frequenzumrichters wird das Ausgangsdrehmoment erhöht, um eine stabile Drehzahl wiederherzustellen.
Im Grunde genommen wird die Drehzahlregelung letztlich durch die Drehmomentregelung erreicht.
Daher kann man das verstehen:
- Die Drehmomentsteuerung ist eines der Mittel zur Erreichung der Vektorsteuerung.
Visuelle Analogie: Tempomat vs. feste Drosselklappe
Um diese Beziehung intuitiv zu verstehen, sollten Sie sich folgende Analogie vor Augen führen:
- Vektorielle Kontrolle: Wie der Tempomat eines Autos. Das System passt die Drosselklappe (Drehmoment) automatisch an, um die Geschwindigkeit unabhängig vom Gelände konstant zu halten.
- Drehmomentkontrolle: Als würde man das Gaspedal konstant halten. Das Drehmoment bleibt konstant, wodurch die Geschwindigkeit bergauf geringer und bergab höher wird.
Genau das ist der Kern des Unterschieds zwischen den beiden Kontrollmodi:
- Die Vektorsteuerung hält die Geschwindigkeit konstant (Drehzahlregelung)
- Die Drehmomentsteuerung hält das Drehmoment konstant (Drehmomentregelung)
Schlussfolgerung: Auswahl des geeigneten Kontrollmodus
Aus Sicht der Ingenieurpraxis:
- Wenn das System eine hochpräzise Geschwindigkeitsregelung erfordert (z. B. Aufzüge, CNC, Kräne), wählen Sie die Vektorregelung.
- Für Systeme, die eine konstante Drehmomentabgabe erfordern (z. B. Wicklung, Zugregelung, Extruder), wählen Sie Drehmomentregelung.
- In Hochleistungs-VFDs werden auch fortschrittliche Algorithmen wie DTC vs. FOC VFD implementiert, um eine schnellere Reaktion und geringere Fehler zu erreichen.
Unabhängig von der gewählten Regelungsmethode ist das Verständnis ihrer Ziele und Prinzipien entscheidend für die Beherrschung der erklärten VFD-Regelungsmodi und die Verbesserung der Gesamtsystemeffizienz und -stabilität.