1台のVFDで複数のモーターを安全に運転するための4つのルール
フィールド・アプリケーションでは、1つのモーターで複数のモーターを駆動することができます。 可変周波数ドライブ (VFD)は、一般的でありながら問題の多い設計です。多くのエンジニアは、試運転中に過電流、過負荷、IGBTの損傷などの不具合に遭遇しますが、その多くは不適切な選択やパラメータ構成に起因しています。.
本書は、単一VFDによる複数モータの制御について、選択原理、パラメータ構成、モータ保護、始動/停止操作の4つの側面から、実践的なエンジニアリング経験を組み合わせて、主要な操作面を包括的に取り上げています。安全で安定した効率的なマルチモータ制御システムを構築できます。.
VFD選択の原則:1台のVFDで複数のモーターを使用する場合の正しい構成
VFDマルチモーターアプリケーションを設計する場合、選定が最も重要なステップとなります。.
1台のVFDで複数のモーターを駆動する場合、この2つの原則を満たさなければならない:
- VFD 定格電力 ≥ 全モータ定格電力の合計。.
- VFD定格電流≧全モータの定格電流の合計。.
例えば、定格出力5kW、7.5kW、11kWの3つのモータを使用する場合、選択されるVFDは定格出力≥23.5kWで、合計定格電流がモータの合計電流を上回る必要があります。.
長時間の運転による過負荷やIGBTの過熱を防止するため、VFDの定格を1段階大きくしてください。.
VFDパラメータ設定のポイント(マルチモーターシステム)
マルチモーターシステムのVFDパラメータを設定する場合は、以下のロジックを厳守してください:
- モータ定格出力パラメータ:全モータ出力の合計を入力する。.
- モータ定格電流パラメータ:全モータの合計定格電流を設定する。.
- モータの定格電圧:通常380Vまたは400V。.
- 定格周波数:モータの銘板に従って50Hzに設定する。.
- 制御モード(V/F制御モード):
- 加減速時間:
- 始動中に VFD 過電流フォルトが発生した場合は、加速時間を延長します;;
- シャットダウン中に VFD の過電圧トリップが発生した場合は、減速時間を延長してください。.
- 過負荷保護設定:過負荷保護パラメータを総定格電流の150%に設定し、保護が甘すぎてIGBT保護不良が発生しないようにします。.
- トルクブースト:低周波で失速することなく、スムーズな始動を保証するために適切に増幅する。.
マルチモーターセットアップにおけるモーター保護
VFDによる複数モーターの構成では、1台のVFDで各モーターを個別に保護することはできません。そのため、外部保護回路を追加する必要があります:
- 各モーターには、以下のものが装備されていなければならない:
- サーキットブレーカー(短絡保護)
- ACコンタクタ(接触器)
- サーマルオーバーロードリレー(サーマルオーバーロードリレー)(サーマルオーバーロードリレー)
- モーターが過負荷、短絡、回転停止に陥った場合、他のモーターの動作に影響を与えることなく、故障した回路を個別に分離することができる。.
- システム内に長いケーブルがある場合は、長いケーブ ル用のVFD過電圧ソリューションを実装するか、出力リアク ターを追加してモーターの絶縁を保護することを検討します。.
マルチモーター始動・停止手順
VFD の複数モーター始動手順(低周波)のシナリオでは、誤った始動 / 停止方法が VFD トリップの主な原因です。.
正しい操作は以下の通り:
- スタートアップ・プロセス:
- まず、VFDを2~5Hzで無負荷運転する;;
- その後、モーターを1つずつ順次接続する;;
- すべてのモーターが作動した後、目標周波数まで徐々に上げる。.
- この方法は、過大なローターロック電流による過電流アラームを効果的に防止する。.
- 停止手順:
- 徐々に動作周波数を2~5Hzに下げる;;
- モーターを1台ずつ順次停止させる;;
- 最後に、DCバス過電圧の原因となるエネルギーの逆流を防ぐため、VFDメインユニットをシャットダウンします。.
この段階的始動/停止戦略は、VFDの過負荷トリップやIGBT損傷のリスクを大幅に低減します。.
結論 - VFDマルチモーターアプリケーションのベストプラクティス
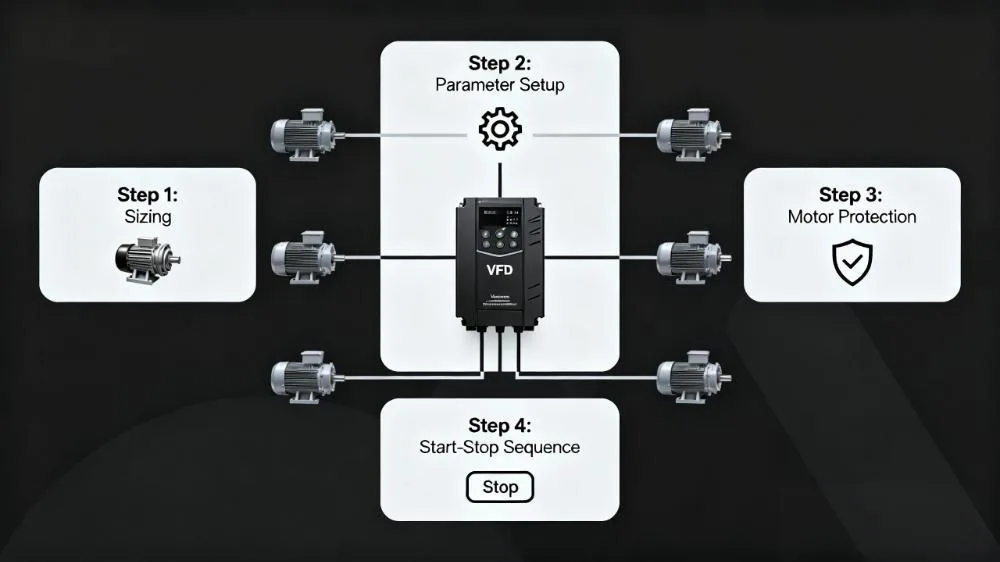
まとめると、1つのVFDに複数のモーターを実装するには、4つの重要な原則をマスターする必要があります:
- 適切な選択:総電力と電流の合計を第一に考える;;
- 正確なパラメータ:マルチモーター負荷の設定を厳密に行う;;
- 包括的な保護:短絡および熱保護を個別に設定できます;;
- スムーズなスタート/ストップ:低頻度の段階的なスタートアップとシーケンシャルなシャットダウンを実施。.
これらの方法に従うことで、1台のVFD複数モータのシステム制御を安全に行うことができ、モータとインバータの両方の寿命を延ばしながら運転の安定性を高めることができます。.