눈에 보이는 결함이 없는 과전류 결함 및 모터 진동
소개 - 모터 진동으로 실제 VFD 과전류 고장 사례 진단하기
안녕하세요, 여러분. 오늘은 실제 사례를 공유하고자 합니다. VFD 드라이브 시스템 문제 해결 많은 엔지니어가 현장에서 직면할 수 있는 사례입니다.
자세한 내용은 다음과 같습니다:
A VFD 드라이브 모터 #1에 연결했을 때는 시스템이 완벽하게 작동했지만, 동일한 모델인 모터 #2에 연결했을 때는 모터 진동과 과전류 경보가 발생했습니다.
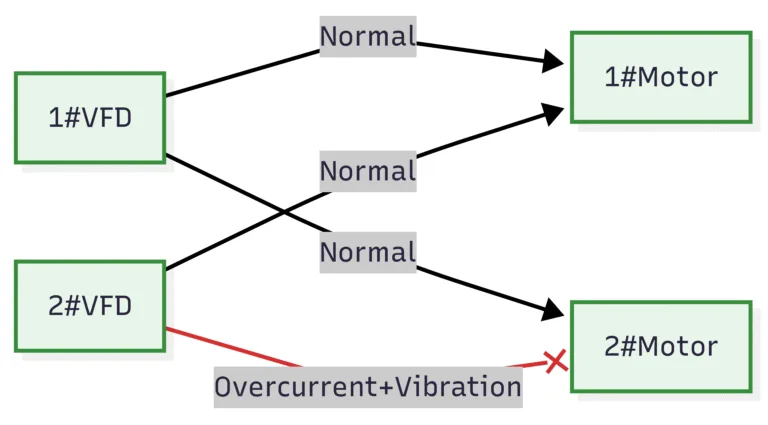
고객은 전체 교차 테스트를 수행하여 이러한 결과를 얻었습니다:
- VFD #1 + 모터 #1: 정상
- VFD #1 + 모터 #2: 일반
- VFD #2 + 모터 #1: 정상
- VFD #2 + 모터 #2: 진동 + 과전류 경보
고객은 “장치와 매개 변수가 동일한데 어디가 문제인가요?”라고 의아해했습니다.”
기존 진단이 VFD 과전류 고장 문제 해결에 실패하는 이유
모터 진동 결함의 시각적 증상은 오해의 소지가 있습니다.
핵심 문제는 하드웨어가 아니라 사고방식에 있습니다.
고객은 문제를 진단할 때 여전히 기존의 라인 주파수 로직을 적용하고 있었습니다. 라인 전력 시스템에서는 모터나 컨트롤러를 교체하여 비교를 통해 결함을 파악하는 것이 일반적인 관행입니다. 이는 라인 전압 시스템에서는 작동하지만 VFD 드라이브 시스템에서는 작동하지 않습니다.
왜 그럴까요?
사람에게는 똑같아 보이는 것이 VFD에게는 똑같지 않기 때문입니다.
근본 원인 - 자동 튜닝이 없는 경우 VFD 과전류 결함으로 이어짐
VFD가 각 모터의 전기적 시그니처를 학습하는 방법
적절한 시운전 절차에서는 VFD 드라이브 시스템이 모터를 구동하기 전에 정적 자동 튜닝(모터 식별이라고도 함) 프로세스를 실행해야 합니다. 이를 통해 VFD는 해당 모터의 정확한 전기적 특성을 학습합니다.
자가 학습 중에 VFD는 다음과 같은 매개 변수를 수집합니다:
- 고정자 저항 및 인덕턴스
- 로터 저항 및 인덕턴스
- 누설 자속 및 자화 곡선
- 자기 포화 동작
- IGBT 스위칭 특성 보정
- 로터 전자기장 및 자속 역학
이러한 매개 변수는 VFD가 제공하는 데 매우 중요합니다:
- 고정밀 속도 제어
- 높은 토크 출력
- 부드러운 동적 응답
- 자속 보정 및 모터 모델 추적
VFD 커미셔닝에서 자가 학습을 건너뛰면 어떤 일이 발생합니까?
이 단계를 건너뛰면 VFD는 본질적으로 “알지 못하는” 모터를 제어하려고 합니다. 결과는? 부정확한 제어, 불규칙한 토크 동작, 모터 진동 및 VFD 과전류 오류와 같은 문제가 발생합니다.
이를 모터 모델 불일치라고 하며, 가장 흔하게 발생하는 숨겨진 문제 중 하나입니다.
갑작스러운 VFD 과전류 오류 경보의 일반적인 시나리오
대형 모터 스타트업 및 튜닝되지 않은 모터
자동 튜닝을 수행하지 않는다고 해서 모든 시스템이 실패하는 것은 아닙니다.
하지만 20년 동안의 경험에 비추어 볼 때 거의 모든 사례에 관련되어 있습니다:
- 전원 켜기 시 VFD 시동 진동
- 갑작스러운 과전류 경보
- 가속 또는 감속 시 VFD 토크 리플
...모터 식별이 누락되거나 잘못된 경우로 거슬러 올라갈 수 있습니다.
이러한 시나리오에서 더 많이 발생하는 경향이 있습니다:
- 설치 후 대형 모터 시운전
- 새로운 자동 튜닝 없이 모터 교체
- 동적 요구가 높은 시스템(예: 장력 제어, 와인딩)
- 교차 사용 설정에서 하나의 모터가 여러 VFD로 구동되는 경우
동일한 모터를 공유하는 멀티 VFD 시스템
특히 단일 모터가 서로 다른 시간 또는 부하 공유 설정을 통해 여러 VFD와 페어링되는 시스템에서 모터의 시그니처에 따라 각 VFD를 자동 조정하지 않으면 제어 충돌 및 불일치하는 플럭스 프로파일이 발생할 수 있습니다.
모터 진동 및 VFD 과전류 오류를 방지하는 올바른 방법
VFD 설정에서 정적 자동 튜닝을 위한 올바른 단계
이 문제를 해결하고 예방하려면 다음 권장 순서를 따르세요:
- VFD를 공장 설정으로 초기화
- 모터에서 기본 명판 매개변수 입력
- 정적 자동 튜닝/모터 식별 수행
- 학습된 파라미터를 저장하고 업데이트된 모터 모델을 사용하여 VFD 드라이브 시스템을 제어할 수 있습니다.
대부분의 경우 모터 진동과 VFD 과전류 오류를 완전히 제거하고 모터의 부드러움과 응답성을 크게 개선할 수 있습니다.
결론 - 자동 튜닝은 VFD 과전류 오류를 방지하는 열쇠입니다.
숙련된 VFD 엔지니어에게는 이것이 기본적인 관행입니다. 하지만 라인 전력 분야 출신 기술자나 처음 접하는 주니어 엔지니어의 경우 VFD 드라이브 시스템, 이 명확하지 않을 수 있습니다.
다음은 황금률입니다:
명판만 보고 모터를 판단하지 마세요. 모든 모터에는 고유한 전기적 특징이 있습니다.
세상에 똑같은 나뭇잎이 없는 것처럼, 같은 모델이라도 자속 곡선, 인덕턴스, 저항 또는 동적 동작에서 100%와 같은 모터는 없습니다.
이것이 바로 VFD가 제대로 작동하기 위해 모터별 모델링에 의존하는 이유입니다.
최종 요점
이 사례의 결론은 간단하고 명확합니다:
자동 튜닝이 수행되지 않았습니다.
모터를 설치하거나 시운전할 때는 다른 모터와 동일해 보이더라도 항상 모터 식별을 수행하세요. 이 한 단계만으로도 다운타임, 오진, 반복되는 오류로 인한 시간을 절약할 수 있습니다.
VFD 커미셔닝 체크리스트에 이 항목을 추가하면 나중에 후회하지 않을 것입니다.